

在自动化测量产线中如果遇到设备损坏或者机器人碰撞等外力问题,不仅会导致三维扫描仪与机器人硬件连接的相对位置发生改变,而且软件中三维扫描仪基准坐标与机器人大地坐标关系也会发生改变,这将直接影响自动化测量的结果,导致数据拼接错位等等。
如果想再次使用就要将设备调试期间配置的所有零件检测模板(每次扫描对应的机器人姿态,以及自动检测的取点模板)全部重新学习,这就大大增加了意外发生时的损失。虽然这些问题出现的几率较低,但是对于目前生产型企业的高自动化程度来说,可能会因此产生高额的损失。
三维扫描仪移机修正算法开发,主要针对本文中所提及到的使用中的实际问题,对于手眼关系变动的情况进行自修正算法的研发。自修正算法的主要作用体现在手眼关系变化后不再需要繁琐的校准以及模板调试,在处理完生产线意外情况后,操作人员只需点击自修正功能对应的按钮即可执行自修正算法,当自动化设备再次启动时,可保证自动化检测的程序依然可以正常运行。
以下是通过自修正算法使用前后扫描数据的截图,可以直观看出该算法的作用。
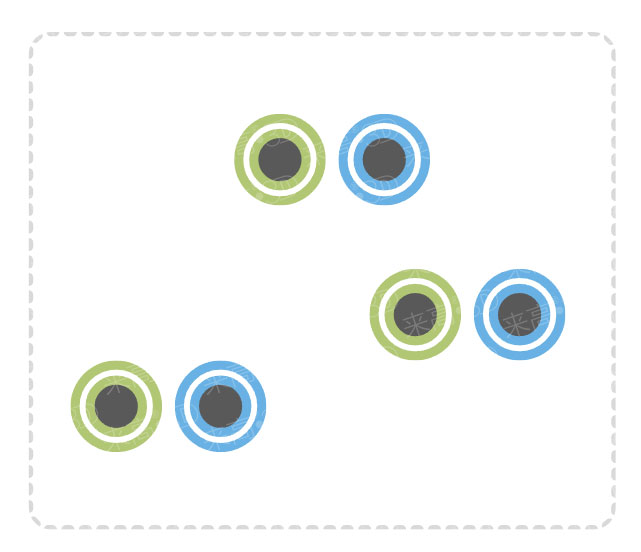
图一是手眼关系发生移位后未使用自修正算法时的扫描数据。
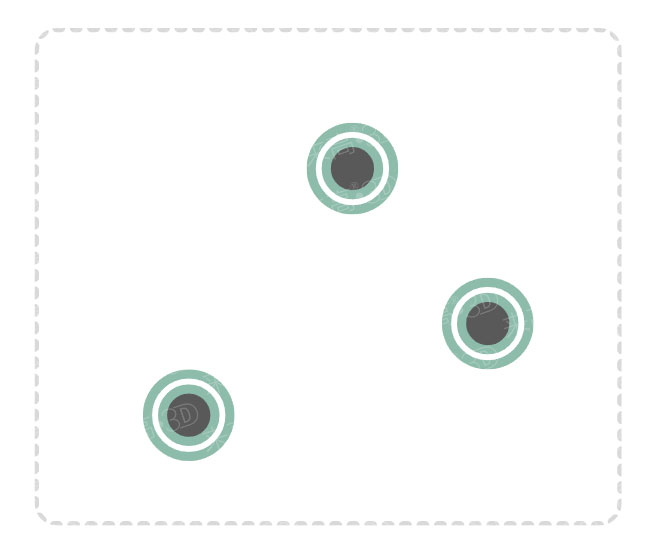
图二是手眼关系发生移位后使用自修正算法之后的扫描数据。
官网视频号·点击视频·关注我们
往期回顾
↙“点击下方”查看更多精彩内容





