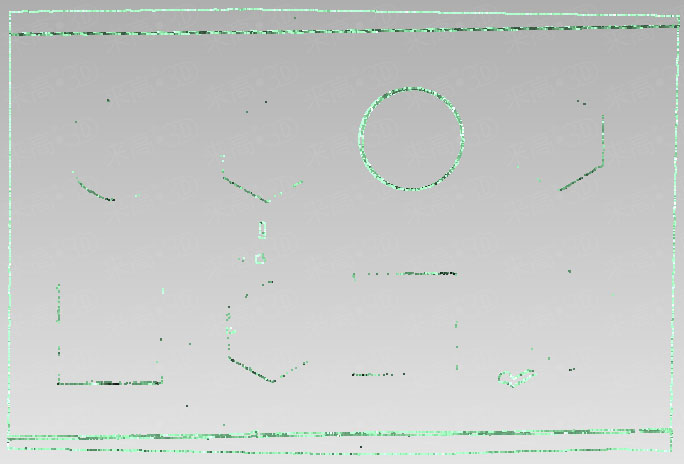
在计算机视觉引导与检测应用时,三维点云特征的提取是关键的一部分。点云边界特征质量严重影响点云的分割、形状搜寻等算法的效果。
来高
边界识别问题
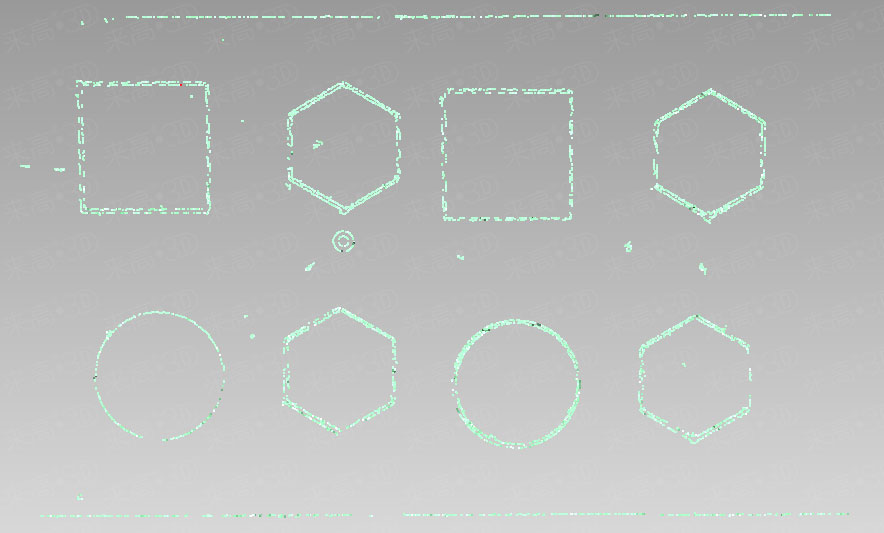
解决方案
课堂总结
官网视频号·点击视频·关注我们
案例推荐
多机联动扫描系统助力嫦娥五号构建月表地形
喷漆自动化三维视觉全流程
混凝土立方试块尺寸三维检测全流程
↙“点击下方”查看更多精彩内容
相关推荐
第22届天津工博会圆满收官
邀您共鉴第22届天津工博会
津ICP备18007808号 Copyright©2005-2021
来高科技(天津)有限公司