

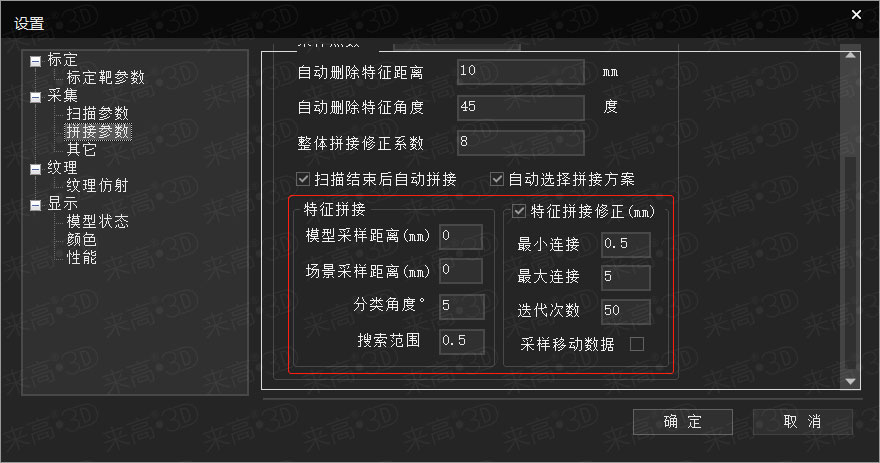
三维视觉系统在引导机器人定位时,首先要在模板数据和当前三维点云数据之间进行特征匹配。为了适应不同特征的工件和应用场景,来高三维扫描软件(Techlego)提供匹配算法,并且对外开放匹配参数的设置。匹配参数主要包含拼接参数中的特征拼接参数和特征拼接修正参数两部分内容,如下图所示。
示例一
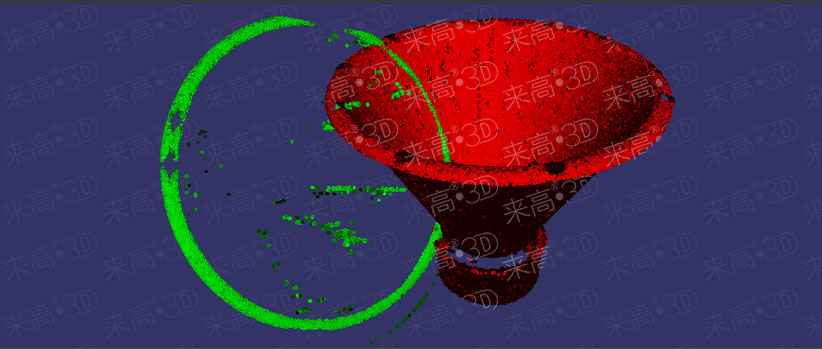
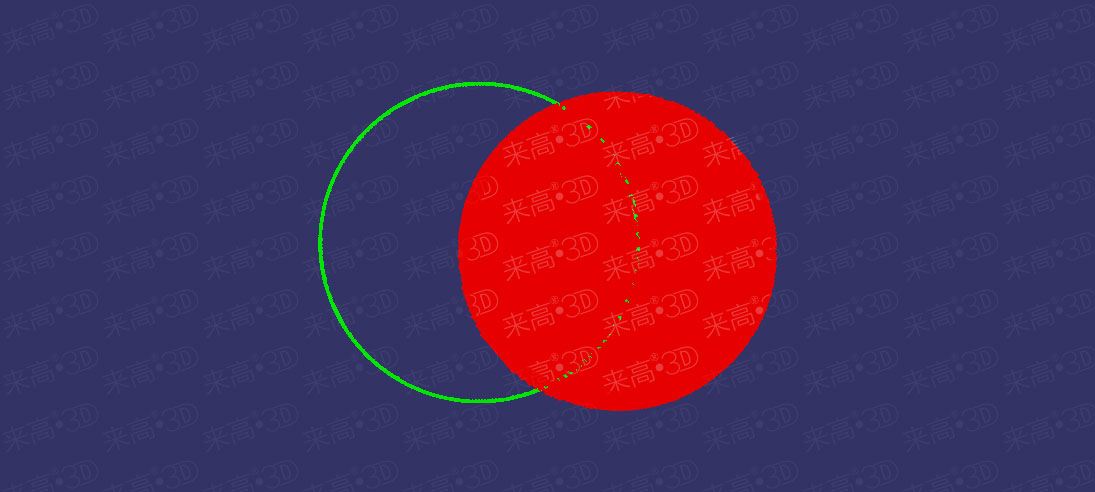
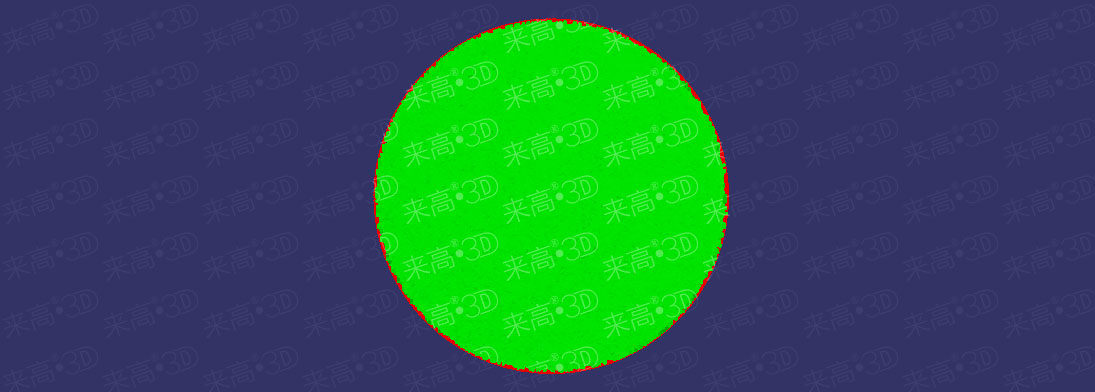
下图中红色数据为完整的工件模板数据模型,绿色部分为当前的三维点云数据。由于现场环境的特殊性限制,三维视觉系统只能得到工件开口处的点云,在初次匹配时,由于参数设置不合适,模板数据和当前三维点云数据不能准确匹配。
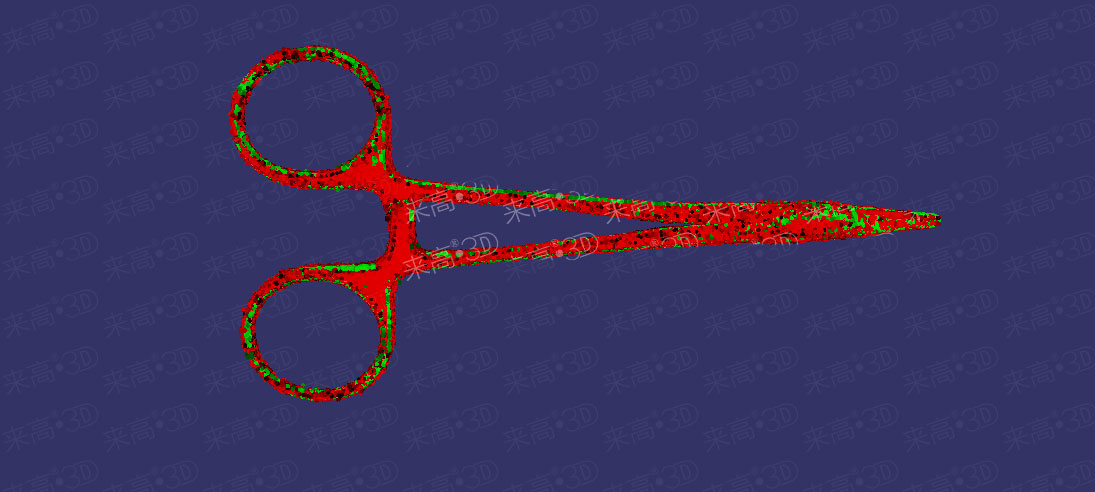
示例二
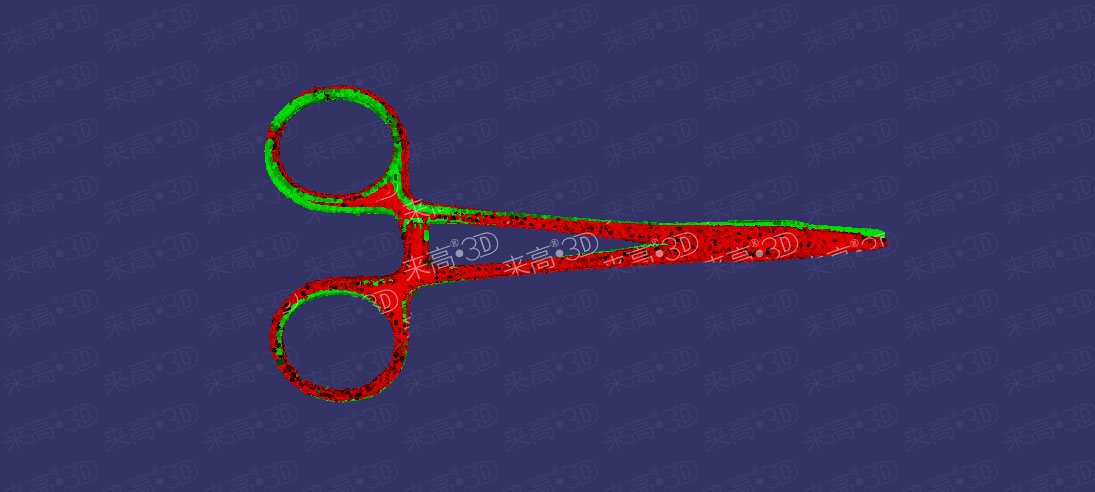
剪子具有高度对称性,很容易特征误识别,模板数据与当前三维点云数据在匹配时很难完全贴合。为了进一步提升匹配效果,可以勾选特征拼接修正选项,在初步匹配之后进一步修正。
示例三
案例总结

官网视频号·点击视频·关注我们
经典案例
↙“点击下方”查看更多精彩内容





