

点云数据处理是三维测量与建模领域的关键环节,其导入与处理流程优化对于数据使用至关重要。扫描点云数据导入程序旨在基于三维采集软件SDK接口,自动将三维点云数据快速导入至相关软件中,以便于后续的处理、分析、尺寸检测、建模及可视化,提升了工作效率与数据应用的灵活性。
在对客户端扫描得到的点云数据进行导入之前,先把程序的大致框架搭建好。
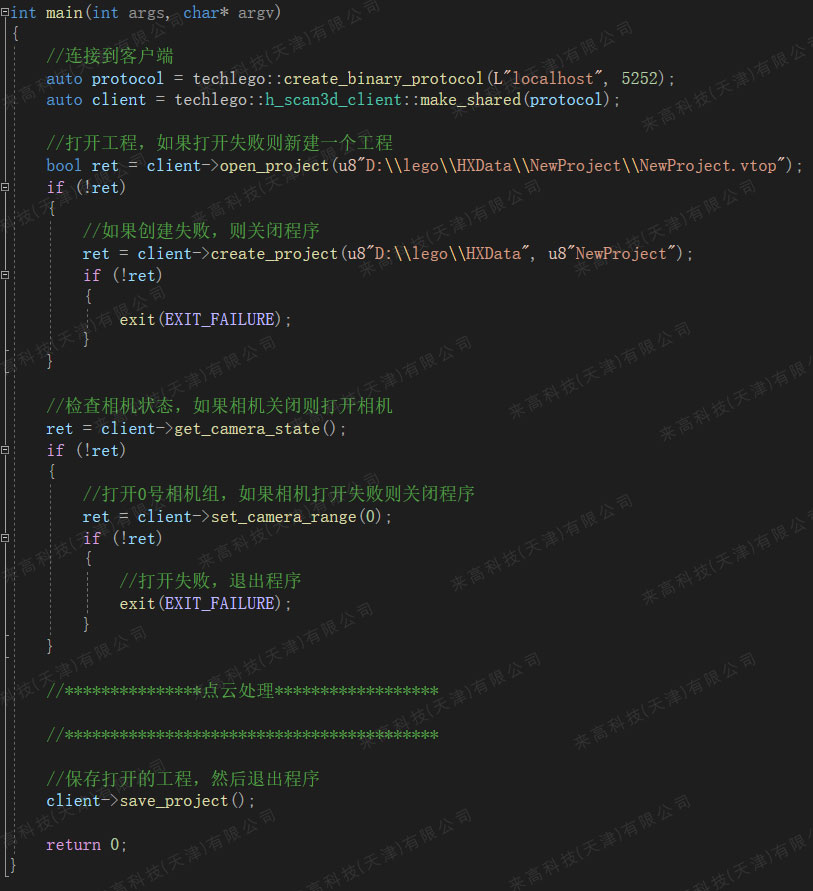
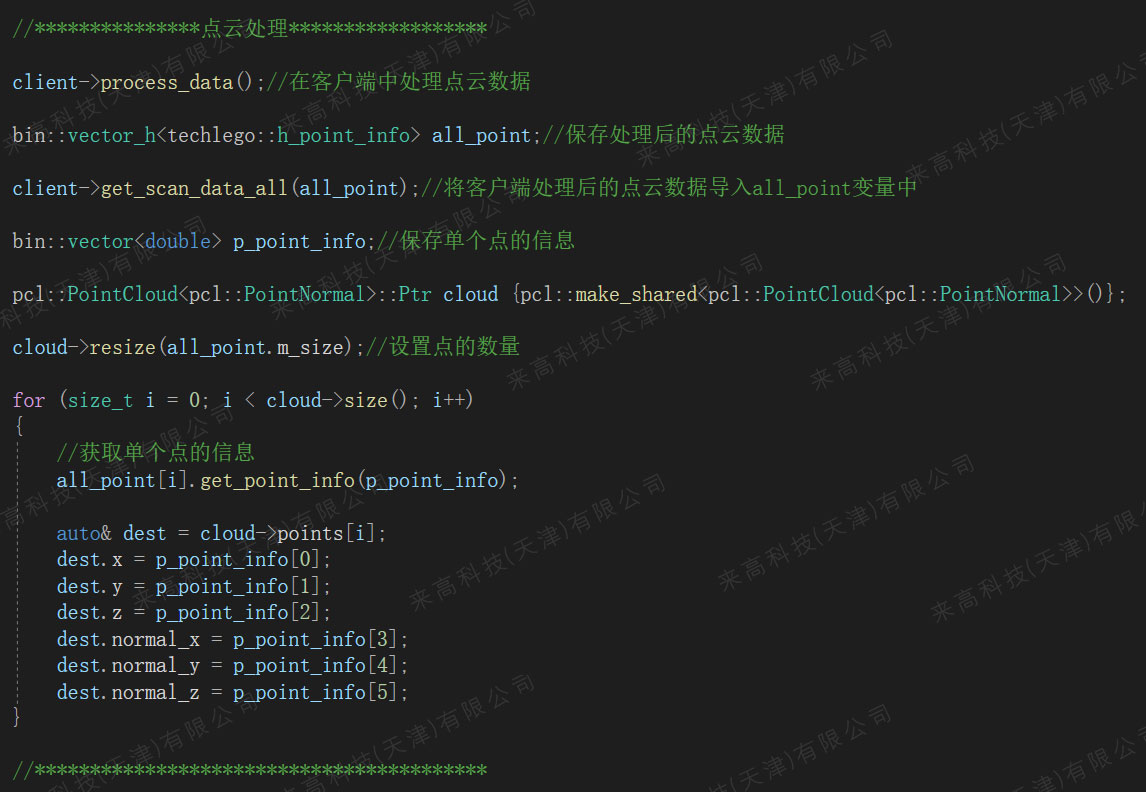
然后使用process_data函数预处理点云数据,其返回值为bool类型,表示处理点云是否成功。想要从客户端中导入点云数据,需要使用一个techlego::h_point_info结构来保存单个点的信息;准备一个保存techlego::h_point_info的数组,可以保存整个点云的信息。

使用get_scan_data_all成员函数,其参数为用于保存点云的数组,即变量all_point。
这个成员函数的原型如下:
voidtechlego::h_scan3d_client::get_scan_data_all (bin::vector_h<h_point_info>& pt_clouds);
使用client变量对其进行调用,存入all_point变量来获取客户端打开工程扫描到的点云数据。

在h_point_info的结构中有一个成员函数get_point_info用于获取单个点的三维点位信息,这个成员函数的原型如下:

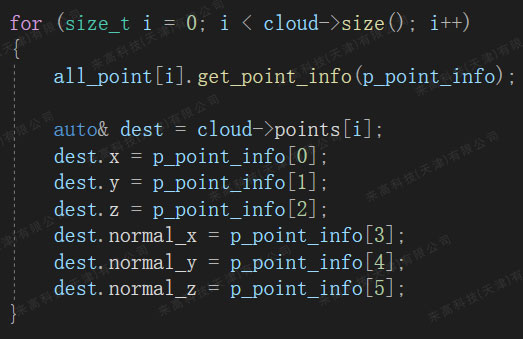
使用get_point_info将信息存入p_point_info变量中

到此为止,我们就拿到了从客户端中导出的单个点云信息,它包含一个直接坐标系坐标的三个分量x, y, z的值,还有这个点的法向量的三个分量的值。
为了能够使用pcl点云库来处理我们的原始数据,这里使用PointNormal类型来保存导出的点云数据,即声明如下类型:

使用resize函数设置即将存入的点的数量

用for循环将点逐一存入cloud变量中
之后我们就可以通过cloud变量来对从客户端导入的点云数据进行一系列的操作了。
整个点云数据从客户端导入到程序的完整过程如下:
综上所述,实现了将点云数据从客户端到专业处理软件的高效导入,这一过程不仅简化了工作流程,还极大增强了点云数据处理的深度与广度,为三维建模、尺寸分析及可视化应用提供了强大的支持平台。

官网视频号·点击视频·关注我们

经典案例
↙“点击下方”查看更多精彩内容





