

技术背景
TECHLEGO-来高科技
在现代工业自动化的浪潮中,手眼标定作为连接视觉与机械控制的关键环节,其核心在于校准3D相机与机器人之间的相对位置关系,从而确保由视觉系统获取的点云数据能够准确无误地映射至机器人的工作空间内。本文旨在探讨如何运用Techlego软件进行手眼标定,进而实现从点云坐标系到机器人坐标系的准确转换,以增强机器人在复杂环境下的操作性能及工作效能。
经过手眼标定后,机器人系统可以根据扫描得到的点云数据进行一系列准确的操作。例如,通过手眼标定后,可以利用机械臂根据扫描到的点云信息准确地抓取乱序物体;随后,机器人能够按照预先设定的动作序列,将物体移动到目标位置。这种技术在制造业中有着广泛的应用,包括但不限于自动化装配、搬运等环节,不仅降低了对人力的依赖,同时也促进了生产流程的优化。
下面介绍使用Techlego软件转换点云坐标系到机器人坐标系的过程:
1.加载手眼标定文件
利用Techlego软件进行手眼标定时,首先需要加载之前保存的手眼标定文件。
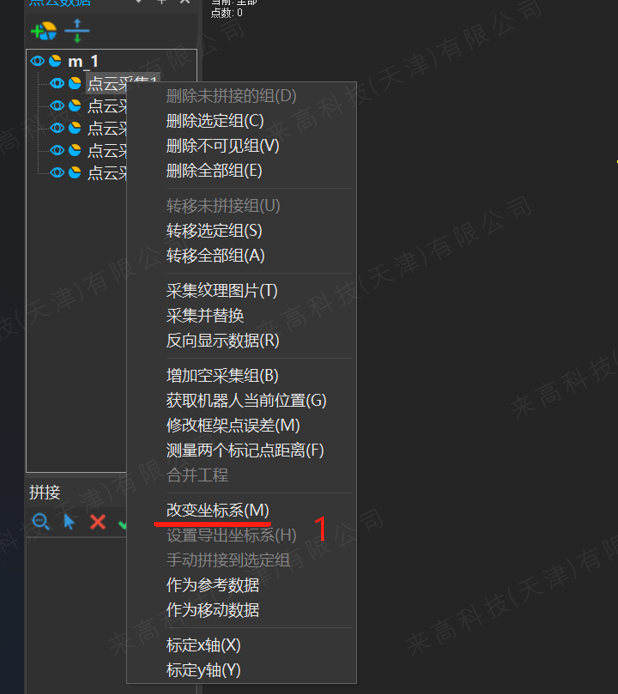
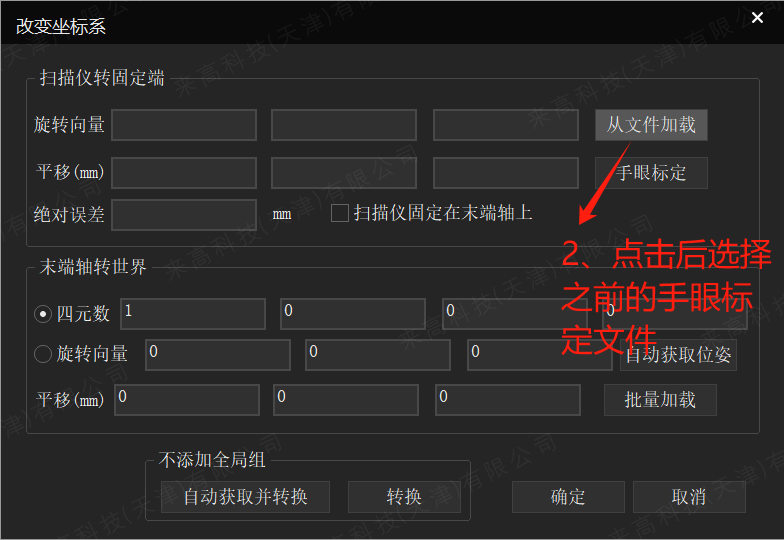

2.转换点云坐标系

总结
TECHLEGO-来高科技
综上所述,通过准确的手眼标定,我们不仅能够增强机器人视觉系统的可靠性,还能进一步提高其在复杂场景中的作业精度,实现了从视觉感知到物理操作无缝对接的目标,为工业领域带来了灵活性与高速有效性。展望未来,随着技术持续进步,手眼标定和点云处理技术无疑将在更多应用场景中发挥重要作用,并指引着智能制造领域的革新方向。
官网视频号·点击视频·关注我们

经典案例
↙“点击下方”查看更多精彩内容





