导言
在三维扫描技术领域,点云数据作为记录物体表面空间分布的重要载体,其质量与完整性对于后续三维建模、形变分析以及精密测量等应用尤为关键。点云拼接作为三维数据处理中的核心环节,直接影响最终模型的精度与实用性。在实际扫描过程中,单幅点云往往无法覆盖目标全貌,需通过多次扫描并将不同坐标系下的点云数据统一至同一参考框架中,以实现完整三维重构。
接口介绍
TECHLEGO-来高科技
/// <summary>
/// 从文件导入框架标记点
/// </summary>
/// <param name="path">文件路径</param>
/// <param name="error">-1代表导入的是ppc文件,不用设置误差,否则需要设置</param>
void import_markers_from_file(const wchar_t* path, double error = -1);支持asc和ppc格式框架点文件导入。
数据准备
TECHLEGO-来高科技
1、来高工程文件和框架点文件


2、初始化准备
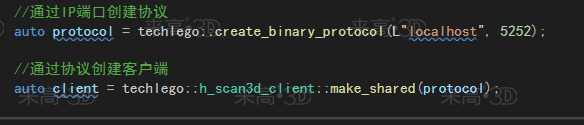
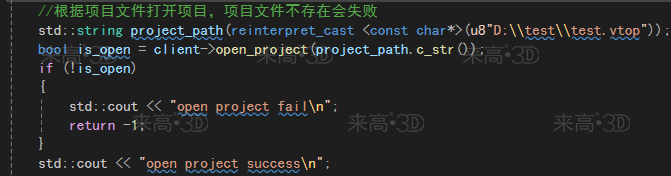
3、打开工程
4、导入框架点

总结
TECHLEGO-来高科技
通过从文件导入框架标记点这一核心功能,我们为点云拼接流程引入了更高水平的可控性与精确度,该设计将人工布设控制点的精确性与计算机自动匹配的高效性相结合,构建出更为鲁棒且可靠的点云数据处理体系,为三维重构应用提供了坚实的技术支撑。

官网视频号·点击视频·关注我们